

MÔ MEN XOẮN TẢI CỦA ĐỘNG CƠ TRONG THIẾT BỊ SỬ DỤNG BĂNG TẢI DÂY ĐAI RĂNG
- 2022-06-12
- THIẾT KẾ- CHẾ TẠO MÁY
XT Mechanical Blog xin chào các bạn.

Trong bài trước, để đáp ứng yêu cầu của khách hàng là “muốn thay đổi cách thức vận hành của thiết bị” để rút ngắn nhịp điệu sản xuất với bộ truyền động là động cơ servo, chúng tôi đã trình bày về phương pháp “giảm thời gian tăng tốc của động cơ servo (tăng giá trị gia tốc). Ở đó, chúng ta cũng đã biết được cần phải tính toán đại lượng “mô men xoắn tải hiệu dụng”, là giá trị mô men xoắn trung bình cần trên đơn vị thời gian.
Hôm nay, chúng ta sẽ tìm hiểu những điều cần lưu ý và phải tính toán đến trong tình huống “muốn thay đổi cách thức vận chuyển” bằng cách thay đổi bố trí của thiết bị và sử dụng băng tải dây đai răng. Tuy đối tượng cụ thể trong bài viết là “băng tải dây đai răng” nhưng từ giờ để ngắn gọn chúng tôi xin được gọi tắt là “băng tải”.
Không chỉ mỗi băng tải, những thiết bị vận chuyển đơn trục tương tự vậy thường là những thiết bị dễ sử dụng và không mất nhiều công sức thiết kế, tuy nhiên nếu vì thế mà ta chọn lựa một cách “tùy tiện”, thì có thể sẽ dẫn tới những sai sót sau này.
MỤC LỤC
- Sự khác nhau của mô men xoắn tải động cơ tùy theo cách thức vận hành
- Công suất động cơ khi vận chuyển theo phương nghiêng
- Biện pháp 1 khi công suất động cơ không đủ
- Biện pháp 2 khi công suất động cơ không đủ
- Kết luận
1. Sự khác nhau của mô men xoắn tải động cơ tùy theo cách thức vận hành
[Hình 1] dưới đây mô tả mô hình của một băng tải đơn giản. Băng tải dây đai răng được sử dụng để vận chuyển vật nặng 0.5kg, với đường kính ròng rọc phía truyền động là 100mm và nguồn truyền động là một động cơ servo có công suất định mức 50W được liên kết trực tiếp. Tuy việc tính toán tốc độ vận chuyển không mất nhiều thời gian, nhưng chúng tôi xin phép được lược bỏ để tập trung vào nội dung chính của bài toán.
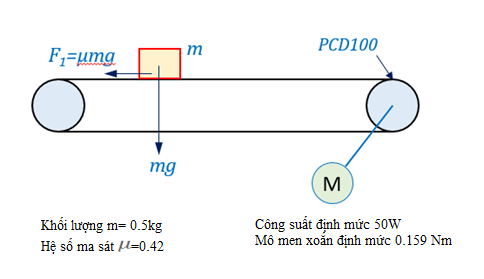
Hình 1. Mô hình băng tải trong bài toán lần này.
Việc lựa chọn băng tải (tính toán công suất động cơ và mô men xoắn tải) thường có trong catalog mà nhà sản xuất cung cấp. Cách lựa chọn thường được dựa trên các đại lượng như thời gian vận hành thiết bị trong một ngày hay hệ số phụ tải, v.v. Ngoài ra, chúng ta cũng có thể tham khảo biểu đồ về năng suất vận chuyển.
Tuy nhiên, nếu quá ỷ lại vào những chi tiết này, chúng ta có thể sẽ vô tình bỏ qua những thay đổi cần chú ý trong điều kiện sử dụng.
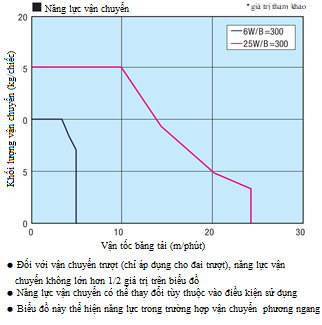
Tham khảo: MISUMI-VONA Timing Belt Conveyors - GV Series
Hình 2. Năng suất vận chuyển (lưu ý 3 mục được chú thích).
Với các điều kiện được đưa ra trên [Hình 1], chúng ta không thể xác định được ngay công suất động cơ nếu chỉ dựa vào các tài liệu trong catalog. Vì thế, chúng ta cần tính mô men xoắn tải của động cơ (trục đầu ra) dựa trên các điều kiện vận chuyển.
Ta có lực ma sát F1 được tính từ khối lượng vận chuyển và hệ số ma sát như sau:
F1=μmg=0.42×0.5×0.98=2.058 (N)
Suy ra mô men xoắn tải động cơ (trục đầu ra) T1 là:
T1=(D/2)F1=(100/2×1/1000)×2.058=0.103 (Nm)
Trong đó, D là đường kính ròng rọc.
Kết quả thu được bằng khoảng 67% mô men xoắn định mức của động cơ, và gấp 1.5 lần phụ tải nếu xét từ phía động cơ. Ta có thể nói công suất động cơ đã chọn là phù hợp.
2. Công suất động cơ khi vận chuyển theo phương nghiêng
Tiếp theo, chúng ta sẽ xem xét trường hợp thay đổi cách lắp đặt băng chuyền đã được sử dụng trong [Hình 1], ta có cách thức vận chuyển theo phương nghiêng như trong [Hình 3]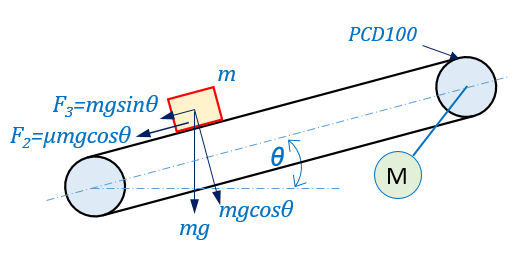
Hình 3. Sử dụng cách thức vận chuyển theo phương nghiêng.
Việc thay đổi cách bố trí hay hướng lắp đặt của thiết bị thường nằm ngoài tính toán ban đầu của người thiết kế. Do đó, với một người thiết kế khác, họ sẽ chỉ nhớ rằng trong trường hợp vận chuyển theo phương ngang ở tư thế ban đầu thì “khối lượng vật, ở đây là 0.5kg, là có thể vận chuyển được”, và dù cho cách thức vận chuyển đã được thay đổi đi nữa, họ vẫn sẽ nghĩ rằng cùng một khối lượng vật thì sẽ vận chuyển được.
Vậy thực tế thì như thế nào, chúng ta hãy cùng xét trường hợp vận chuyển theo phương nghiêng với góc nghiêng 30 độ (so với phương ngang).
Phương vận chuyển là phương nghiêng, khi đó trọng lực tác dụng lên vật được phân tích thành 2 thành phần vuông góc và song song với phương vận chuyển. Ta sẽ tính lực ma sát F2 và lực F3 (là thành phần trọng lực theo phương vận chuyển, song song với mặt dây đai). Ta thu được lực F4 cần thiết để vận chuyển vật là tổng của F2 và F3 như sau:
F4=F2+F3=μmgcosθ+mgsinθ=mg(μcosθ+sinθ)
F4=0.5×9.8×(0.42×cos30°+sin30°)=4.229 (N)
Ta có thể thấy lực F4 lớn hơn 2 lần lực F1 đã tính trước đó. Suy ra mô men xoắn tải động cơ (trục đầu ra) T2 là:
T2=(D/2)×F4=(100/2×1/1000)×4.229=0.211 (Nm)
Giá trị T2 lớn hơn hẳn mô men xoắn định mức của động cơ (0.159 Nm), vì vậy thiết bị sẽ không thể vận hành liên tục được.
Sau đây, chúng tôi sẽ trình bày các biện pháp để giải quyết tình huống mô men xoắn định mức của động cơ nhỏ hơn so với mô men xoắn tải động cơ (trục đầu ra).
3.Biện pháp 1 khi công suất động cơ không đủ
Biện pháp thứ nhất chúng ta có thể nghĩ tới đó là tăng công suất động cơ.
Trong trường hợp động cơ servo hay động cơ có lắp mặt bích (kích thước ngoài), dù có thay đổi công suất động cơ, thì vẫn có thể giữ nguyên kích thước mặt bích hay đường kính trục đầu ra của động cơ.
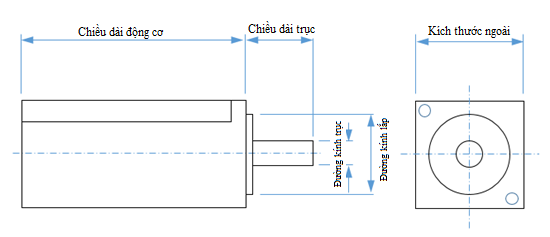
Hình 4. Các kích thước của động cơ.
Bảng 1. Bảng so sánh các kích thước cần thiết của động cơ.
Công suất | Đường kính trục | Chiều dài trục | Đường kính lắp | Kích thước ngoài | Chiều dài động cơ |
50W | 8 | 25 | Φ30 | □40 | 95.5 |
100W | 8 | 25 | Φ30 | □40 | 107.5 |
Ở đầu bài toán, chúng tôi đã lựa chọn động cơ servo 50W, nếu chúng tôi tăng công suất lên loại động cơ 100W, mô men xoắn định mức khi đó là 0.318 N.m, thì hoàn toàn có thể thực hiện vận chuyển đươc.
Đây là một phương pháp khá đơn giản, chúng ta chỉ cần thay động cơ, nên có ưu điểm là phạm vi cải tạo thiết bị là nhỏ. Nhưng nó cũng có khuyết điểm đó là công suất động cơ thay đổi nên cần phải cải tạo lại tủ điện điều khiển.
Với động cơ servo, ta có thể phải thay bộ điều khiển động cơ (Driver) hoặc các bộ phận khác cũng như các dây đấu nối. Ngoài ra, nếu kích thước ngoài không đổi, công suất động cơ càng lớn thì chiều dài tổng của động cơ cũng càng lớn. Chúng ta cần đảm bảo có đủ không gian để lắp đặt thay động cơ (chú ý phần không gian cho phần đuôi động cơ).
Còn trong trường hợp sử dụng khớp nối trục, ta cần phải kiểm tra lại mô men truyền tải cho phép của khớp nối. Nếu ban đầu chọn loại khớp nối trục có kích thước chỉ vừa khít, thì có thể sẽ không đáp ứng được mô men xoắn trục đầu ra của động cơ.
Bảng 2. Tổng kết biện pháp thay thế động cơ
Biện pháp | Bộ phận cần chuẩn bị | Nhân công thiết kế | Nhân công lắp đặt / điều chỉnh |
Chỉ thay thế động cơ | Động cơ | Ít | Ít |
Thay thế động cơ và các bộ phận điều khiển | Động cơ | Ít | Nhiều |
4.Biện pháp 2 khi công suất động cơ không đủ
Một phương pháp khác thường được áp dụng là dùng bộ giảm tốc để khuếch đại mô men xoắn trục đầu ra của động cơ.
Đối với bộ giảm tốc có tỷ số truyền nhỏ, ta cũng có thể gặp trường hợp kích thước ngoài không đổi. Ngoài ra, bộ giảm tốc và bộ phận lắp ghép với động cơ cũng có trong catalog ứng với động cơ có kích thước ngoài phù hợp đã chọn, nên ta chỉ cần thêm các ký hiệu được chỉ định vào đuôi mã sản phẩm của bộ giảm tốc khi đặt hàng, thì sẽ nhận được bộ giảm tốc ở trạng thái có thể lắp ngay vào động cơ.
Về tỷ số truyền, nhỏ thì khoảng 3 hoặc 5, lớn thì khoảng 15 hoặc lớn hơn. Tuy nhiên, khi tỷ số truyền tăng lên, mô men xoắn sau khi được khuếch đại cũng sẽ tăng lên tương ứng, nên là ta cũng cần chú ý về độ cứng của các bộ phận bên trong bộ giảm tốc như bánh răng, trục, ổ bi, v.v, và kích thước ngoài của bộ giảm tốc cũng sẽ lớn theo.
Hơn nữa, vì đường kính trục đầu ra cũng sẽ tăng lên theo, nên cũng cần chọn khớp nối trục lại cho phù hợp.
Tuy nhiên, nếu tốc độ quay động cơ là “đủ” lớn, dù tỷ số truyền có nhỏ cũng không ảnh hưởng nhiều, ta cũng không phải lo về không gian lắp đặt. Vì vậy, so với biện pháp 1 là thay động cơ, thì việc thêm vào bộ giảm tốc có thể dễ dàng được thực hiện hơn.
Bảng 3. So sánh biện pháp thay thế động cơ và lắp thêm bộ giảm tốc
Biện pháp | Bộ phận cần chuẩn bị | Nhân công thiết kế | Nhân công lắp đặt / điều chỉnh |
Thay thế động cơ | Động cơ | Ít | Ít |
Lắp thêm bộ giảm tốc | Bộ giảm tốc | Ít | Ít |
Để quyết định chọn phương án thay động cơ hay là thêm bộ giảm tốc thì từ bảng trên cộng thêm các yếu tố về chi phí, kì hạn sẽ giúp chúng ta đưa ra phán đoán phù hợp.
5.Kết luận
Với bài viết hôm nay, chúng tôi đã trình bày nội dung bài toán mô men xoắn tải động cơ thay đổi tùy thuộc vào cách thức vận chuyển, mà ở đây chúng tôi đã chọn mô hình băng tải sử dụng dây đai. Các bạn hãy nhớ rằng cần phải kiểm tra các nội dung được nêu sau đây khi có sự thay đổi về khối lượng vận chuyển hay cách thức vận hành ở các thiết bị một trục hay hệ băng tải.
- Kiểm tra các thông số kĩ thuật của hệ băng tải (khối lượng vận chuyển, tốc độ định mức, công suất động cơ).
- Tính toán phần dôi ra của phụ tải khi thay đổi cách thức vận hành.
Trong quá trình tính toán đến bước này, nếu có xảy ra vấn đề (mô men xoắn tải trục đầu ra của động cơ vượt quá mô men xoắn định mức của động cơ) thì hãy xét đến hai phương pháp giải quyết sau đây:
- Tăng mô men xoắn trục đầu ra động cơ bằng cách tăng công suất động cơ.
- Tuy tốc độ quay động cơ không thay đổi, nhưng có thể phải thay các bộ phận điều khiển.
- Khuếch đại mô men xoắn trục đầu ra động cơ bằng cách lắp đặt thêm bộ giảm tốc.
- Không có sự thay đổi về động cơ, chỉ cần cải tạo thiết bị. Thường chỉ nên áp dụng khi tốc độ quay động cơ là “đủ” lớn (với tỷ số truyền có thể chấp nhận được)
Chúng tôi đã đưa ra hai phương án giải quyết, nhưng lựa chọn phương án nào là tùy theo từng trường hợp. Mặc dù chúng tôi có thể liệt kê các biện pháp mang tính thiết kế trên giấy, nhưng trong thực tế các bạn cần phải cân nhắc kĩ thêm các yếu tố về chi phí và kì hạn.
Thiết bị vận chuyển được lắp ráp đơn thuần sẽ khiến việc thiết kế của bạn dễ dàng hơn, nhưng hãy đảm bảo đối chiếu các điều kiện sử dụng được liệt kê trong catalog, và các điều kiện sử dụng cho thiết bị mà bạn đang thiết kế. Để nâng cao kỹ năng thiết kế không phải một bước là thành công ngay, cũng không phải là được chỉ dạy bởi ai đó là được. Điều quan trọng là phải tự mình suy nghĩ và biết học hỏi từ những gì đã được tạo ra trước đó.
Lần tới, chúng tôi sẽ nói đến các đặc điểm của hệ đơn trục sử dụng dây đai răng. Sử dụng dây đai răng có thể dễ dàng làm ra được thiết bị vận chuyển dài nhưng bản thân dây đai răng cũng có những đặc trưng vốn có của nó. Việc nắm bắt được các đặc trưng đó sẽ giúp thay đổi chất lượng của thiết kế.
Bài viết hôm nay xin được kết thúc ở đây, hẹn gặp lại các bạn ở các bài viết tiếp theo.
ĐỘ CỨNG DÂY ĐAI RĂNG – CỤ THỂ HÓA HIỆN TƯỢNG OVERSHOOT
- 2022-07-09
- THIẾT KẾ- CHẾ TẠO MÁY
Trong bài trước, để đáp ứng yêu cầu của khách hàng là “muốn thay đổi cách thức vận chuyển”, cùng với những vấn đề sẽ phát sinh như “công suất động cơ không đủ do sự gia tăng của mô men xoắn vận chuyển”, chúng tôi đã đưa ra các giải pháp như “thay thế động cơ, hoặc là lắp thêm bộ giảm tốc”. Ở đó, chúng ta cũng đã biết được cần phải tính toán mô men xoắn phụ tải động cơ vì sự tác dụng của trọng lực lên vật cũng sẽ thay đổi khi thay đổi cách thức vận chuyển vật. Bài viết hôm nay, chúng ta sẽ tìm hiểu những điều cần lưu ý và phải tính toán đến trong một tình huống khác, đó là “muốn kéo dài hành trình vận chuyển” bằng cách thay đổi bố trí của thiết bị và sử dụng cơ cấu chấp hành đơn trục là dây đai răng.

Việc kéo dài hành trình vận chuyển có nghĩa là khoảng cách giữa tâm puli (ròng rọc) ở phía truyền động và tâm puli không tải cũng sẽ dài thêm ít nhất bằng phần đã kéo dài. Cùng với đó, dây đai răng cũng sẽ dài hơn. Như vậy, về bề ngoài thì độ võng của dây đai cũng sẽ lớn hơn, cảm giác về tính cứng của dây đai cũng sẽ không còn như trước lúc hành trình ngắn.
Ngoài ra, nếu ta vận hành hệ ở trạng thái này, sẽ xảy ra hiện tượng "overshoot", tức là vật sẽ bị đi quá một chút rồi quay trở lại vị trí dừng ở quá trình từ khi giảm tốc đến lúc dừng lại. Điều này bị ảnh hưởng bởi độ cứng (hệ số đàn hồi) của dây đai răng, vì thế trong bài viết này chúng tôi sẽ tập trung trình bày về vấn đề này.
Không như trục vít me, dây đai răng không gặp vấn đề tốc độ tới hạn*, giá rẻ và không yêu cầu độ chính xác gia công cao khi lắp đặt, tuy nhiên nếu chúng ta không lưu ý kiểm soát các đặc tính của dây đai, thì có thể dẫn đến phải sửa đổi lại toàn bộ thiết kế.
*Tham khảo bài 10: “Xem xét tính nguy hiểm khi muốn tăng tốc độ ngay trong thiết bị”.
MỤC LỤC
- Chuyển động của vật ở quá trình dừng trong hành trình vận chuyển
- Lực căng và độ giãn cho phép (hệ số đàn hồi) của dây đai răng
- Hệ số đàn hồi và lượng overshoot
- Tổng kết
1.Chuyển động của vật ở quá trình dừng trong hành trình vận chuyển
Khi vận chuyển vật bằng dây đai răng hoặc trục vít me, quá trình vận chuyển thường gồm các quá trình sau: tăng tốc, vận chuyển với tốc độ không đổi và giảm tốc, là quá trình dạng hình thang trên biểu đồ thời gian*. Ở đó, gia tốc được sinh ra trong quá trình giảm tốc, nên sẽ có lực tác dụng lên vật. Đồng thời, sẽ có cùng một lực tác dụng lên dây đai răng hoặc trục vít me bi dùng để vận chuyển vật (định luật 3 Newton về lực và phản lực). Vậy thì điều gì sẽ xảy ra với dây đai răng hoặc trục vít me khi chịu tác dụng của lực này?
* Tham khảo bài 7: “Lập biểu đồ thời gian sản xuất"
Trong trường hợp trục vít me, phần hàng bi giữa đai ốc và trục vít sẽ xảy ra biến dạng đàn hồi. Đặc tính chống lại sự biến dạng này được gọi là “độ cứng”, thường được mô tả trong catalog của trục vít me.
Còn với trường hợp dây đai răng, sẽ xảy ra sự co giãn do biến dạng đàn hồi của vật liệu cao su. Đặc tính “độ giãn” này thường không được viết rõ ràng trong catalog.
Vậy trục vít me và dây đai răng, thì cái nào có độ cứng lớn hơn? Câu trả lời tất nhiên sẽ là trục vít me. Vì dây đai răng có độ cứng nhỏ, nên nếu vận hành trong cùng một điều kiện về tăng tốc và giảm tốc, lượng giãn nở sẽ tăng lên.
[Hình 1] dưới đây là hình ảnh về cơ cấu chấp hành đơn trục với truyền động bằng dây đai răng, và [Hình 2] mô tả cấu tạo bên trong của cơ cấu.
Cơ cấu có cấu tạo đơn giản gồm có dây đai răng và puli răng, và thanh trượt liên kết với dây đai răng. Với trục vít me, độ dài hành trình bị hạn chế do độ võng của trục vít, nhưng với dây đai răng, ảnh hưởng của độ võng là nhỏ nên có thể đáp ứng được các hành trình dài hơn so với trục vít me.

Hình 1. Cơ cấu chấp hành đơn trục (LST10, Misumi)
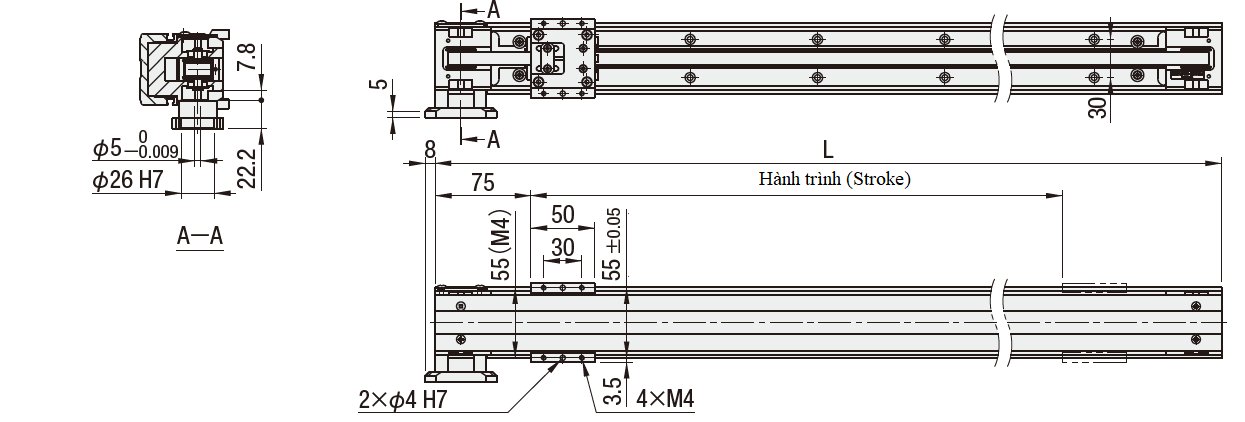
Hình 2. Cấu tạo bên trong cơ cấu chấp hành đơn trục
Tiếp theo, chúng ta sẽ xem xét quá trình giảm tốc khi quan sát hành trình vận chuyển nhờ cơ cấu chấp hành với truyền động dây đai răng.
Trong quá trình giảm tốc, lực tác dụng lên vật phụ thuộc vào mức độ giảm tốc. Nếu giảm tốc độ từ từ, lực tác dụng là nhỏ. Còn nếu giảm tốc độ đột ngột, một lực lớn sẽ tác dụng lên vật. Và bộ phận tiếp nhận lực này chính là dây đai răng và động cơ. Như đã nói ở trên, chất liệu của dây đai răng là cao su nên nó sẽ co giãn. Dây đai bị giãn ra do lực sinh ra trong quá trình giảm tốc và sẽ trở lại trạng thái ban đầu khi quá trình giảm tốc kết thúc (động cơ dừng). Nói cách khác, khi thực hiện giảm tốc (tăng tốc) mạnh, dây đai sẽ bị giãn ra, vượt quá vị trí đích, và sau đó mới quay trở lại vị trí đích. Ta gọi đó là lượng đi quá (lượng overshoot). Trong thiết kế máy, cả hai cách gọi đều được sử dụng, nhưng ở đây chúng tôi sẽ sử dụng cách gọi lượng overshoot.
Trong trường hợp truyền động bằng dây đai răng, hiện tượng này dù ít dù nhiều cũng sẽ xảy ra khi ta tăng giá trị gia tốc để rút ngắn nhịp điệu sản xuất. Bình thường ta không quan tâm đến là do không phát hiện được hoặc là chất lượng sản phẩm không bị ảnh hưởng. Nếu bạn không nhìn thấy nó và nó không ảnh hưởng đến chất lượng, bạn chỉ cần không quan tâm. Nhưng nếu bạn tiến hành đo vị trí dừng bằng đồng hồ đo, kim sẽ dao động trong hầu hết các trường hợp.
Sau đây, chúng ta hãy cùng xem xem liệu có thể dự đoán “độ giãn” này đến mức độ nào nhé.
2.Lực căng và độ giãn cho phép (hệ số đàn hồi) của dây đai răng
Nếu bạn biết phần giãn ra là bao nhiêu khi tác dụng một lực nhất định lên dây đai răng, thì bạn có thể dự đoán độ giãn khi có lực tác dụng trong thực tế. Giờ chúng ta thử nhìn nhận dây đai răng thành lo xo, thì bài toán sẽ là "độ giãn ra khi có lực nhất định tác dụng vào lò xo". Như các bạn đã biết, bài toán sẽ phụ thuộc vào đại lượng hệ số đàn hồi. Vì vậy, chúng ta sẽ cần tìm hiểu cách tính hệ số đàn hồi của dây đai răng.
Trước hết, có một điều kiện tiên quyết mà chúng ta cần xét đến. Vật liệu điển hình cho dây đai răng là cao su chloroprene (màu đen) hoặc cao su polyurethane (màu trắng), nhưng do đặc tính biến dạng đàn hồi của 2 loại cao su này là khác nhau, nên trong bài viết này chúng tôi sẽ chỉ nói về cao su polyurethane.
Từ catalog hay tài liệu kỹ thuật về dây đai răng, ta có các giá trị lực căng cho phép tùy theo loại dây đai răng và độ rộng dây đai răng như trong [Bảng 1] dưới đây.
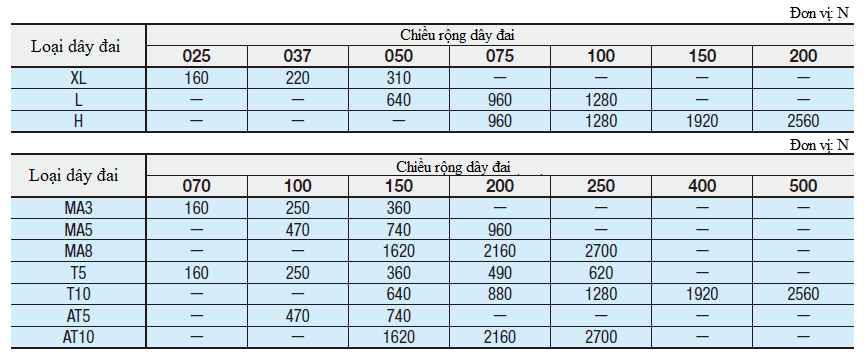
Bảng 1. Lực căng cho phép của dây đai răng
*Tham khảo: https://jp.misumi-ec.com/tech-info/categories/technical_data/td03/a0048.html
Giá trị lực căng cho phép cho biết trong điều kiện sử dụng dây đai răng đúng cách, thì "tác dụng bao nhiêu lực (lực căng) lên dây đai thì được". Lực căng lắp đặt ban đầu tối đa chỉ bằng 50% lực căng cho phép. Ta sẽ xem xét độ giãn tại thời điểm này. Từ tài liệu tham khảo trên ta có [Hình 3] dưới đây. Chúng ta sẽ chú ý đến "giá trị tiêu chuẩn của độ dãn" trong hình.
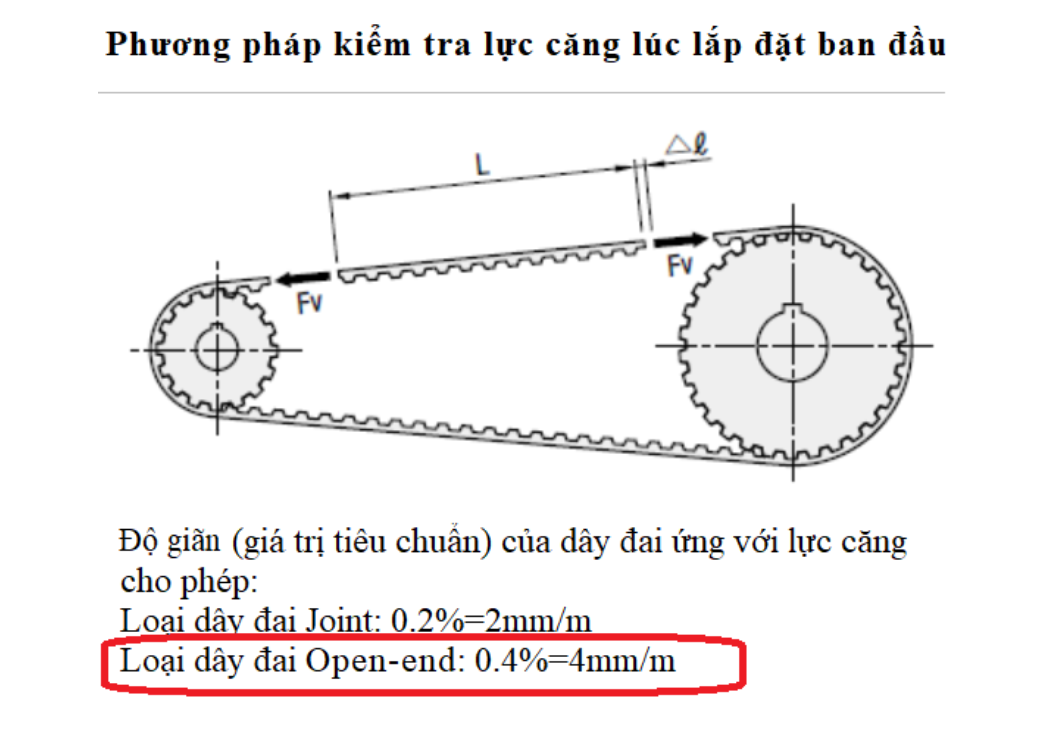
Hình 3. Phương pháp kiểm tra lực căng lúc lắp đặt ban đầu.
Chú thích: Joint là loại dây đai có đầu được nối với đuôi tạo nên một dây đai “vòng tròn khép kín” như ví dụ trong hình 3, khác với loại dây đai mở Open-end là đầu với đuôi tách biệt như là một dây đai thẳng.
Các loại dây đai răng mở Open-end thường được dùng trong cơ cấu chấp hành đơn trục. Vì vậy ta chỉ cần xét điều kiện cho loại Open-end được vẽ khung màu đỏ như trong [Hình 3] ở trên. Ta có thể thấy, khi tác dụng một lực bằng lực căng cho phép lên dây đai răng, với 1m chiều dài dây đai thì độ giãn ra là 4mm.
Ví dụ: Khi với loại răng = H, độ rộng dây đai = 100 (25.4 mm), và chiều dài dây đai = 1m, từ [Bảng 1] ta có lực căng cho phép là 1280N, ta lập đồ thị về độ giãn và lực căng cho phép trong [Hình 4] như sau.
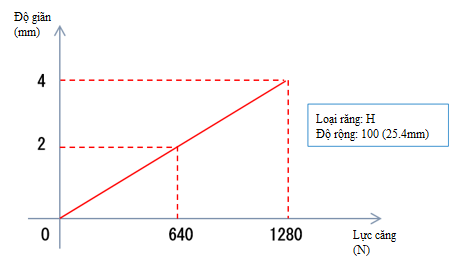
Hình 4. Mối quan hệ giữa độ giãn và lực căng.
Ta cũng có dạng đồ thị tương tự về lực tác dụng và biến dạng đối với lò xo nén. Do đó hệ số đàn hồi của dây đai răng này sẽ bằng 1280 (N) / 4 (mm) = 320 (N/mm).
Tuy vật được vận chuyển khi gắn với dây đai răng, nhưng khi phân tích các đặc tính của dây đai răng, ta có coi nó tương tự như một "lò xo".
3.Hệ số đàn hồi và lượng overshoot
Như đã đề cập ở trên, ta có thể tính toán các đặc tính của dây đai răng tương tự như của một lò xo. Do đó, lượng overshoot trong quá trình dừng có thể dễ dàng tính được từ tải trọng khi dừng và hệ số đàn hổi. Ta có bảng các giá trị overshoot cho một số loại dây đai răng như sau:
Mã dây đai | Lực căng cho phép | Hệ số đàn hồi | Lượng Overshoot |
MA8 | 2160 | 540 | 0.37 |
T10 | 880 | 220 | 0.91 |
AT10 | 2160 | 540 | 0.37 |
Bảng 2. Lượng Overshoot (độ rộng dây đai = 20mm, tải trọng lúc dừng = 200N)
Tùy thuộc vào loại dây đai răng, lực căng cho phép cũng sẽ khác nhau, lượng overshoot cũng sẽ khác nhau tỉ lệ thuận theo đó. Do đó, chúng ta hãy chú ý điều này khi muốn tăng tốc hoặc giảm tốc đột ngột trong trường hợp truyền động bằng dây đai răng.
Vậy thì sẽ có những vấn đề gì sẽ phát sinh trong bài toán “muốn kéo dài hành trình vận chuyển” lần này?
Trong chương trước, chúng ta đã nói "dây đai răng tương tự như lò xo". Nếu coi 1m dây đai răng như một lò xo, điều gì sẽ xảy ra nếu chiều dài dây đai răng trở thành 2m do việc kéo dài hành trình? Câu trả lời sẽ là giống với bài toán là hai lò xo mắc nối tiếp. Hệ số đàn hồi lúc này bằng 1/2 hệ số đàn hồi ban đầu.
Như vậy, lượng overshoot sẽ tăng lên gấp đôi, ví dụ với dây đai răng T10 trong [Bảng 2], lượng overshoot sẽ là 1.82mm. Khi lượng overshoot trở nên lớn như thế này, bằng mắt thường ta cũng sẽ phát hiện được, vì vậy dù ngay cả khi máy móc không có vấn đề gì, thì ta vẫn sẽ cảm thấy “cái này…hơi có vấn đề nhỉ?”.
Vậy chúng ta phải làm gì để ngăn chặn việc tăng lên của lượng overshoot khi kéo dài hành trình vận chuyển?
Ta có thể nới rộng độ rộng dây đai hoặc sử dụng nhiều dây đai cùng lúc. Tuy nhiên, cần lưu ý rằng ngay cả khi độ rộng dây đai được tăng lên gấp 2 lần, thì có nhiều trường hợp lực căng cho phép sẽ không tăng lên 2 lần. Còn trường hợp dùng nhiều dây đai cùng lúc, có thể nhiều bạn sẽ nghĩ rằng hệ số đàn hồi sẽ tăng lên theo bội số lượng dây đai, tuy nhiên nên cân nhắc rằng độ căng của các dây đai sẽ không giống nhau, vì vậy ta nên coi như có sự hao hụt khoảng 10%.
Để ôn tập lại, chúng tôi sẽ tóm tắt cách tính hệ số đàn hồi khi các lò xo được ghép với nhau trong bảng dưới đây.
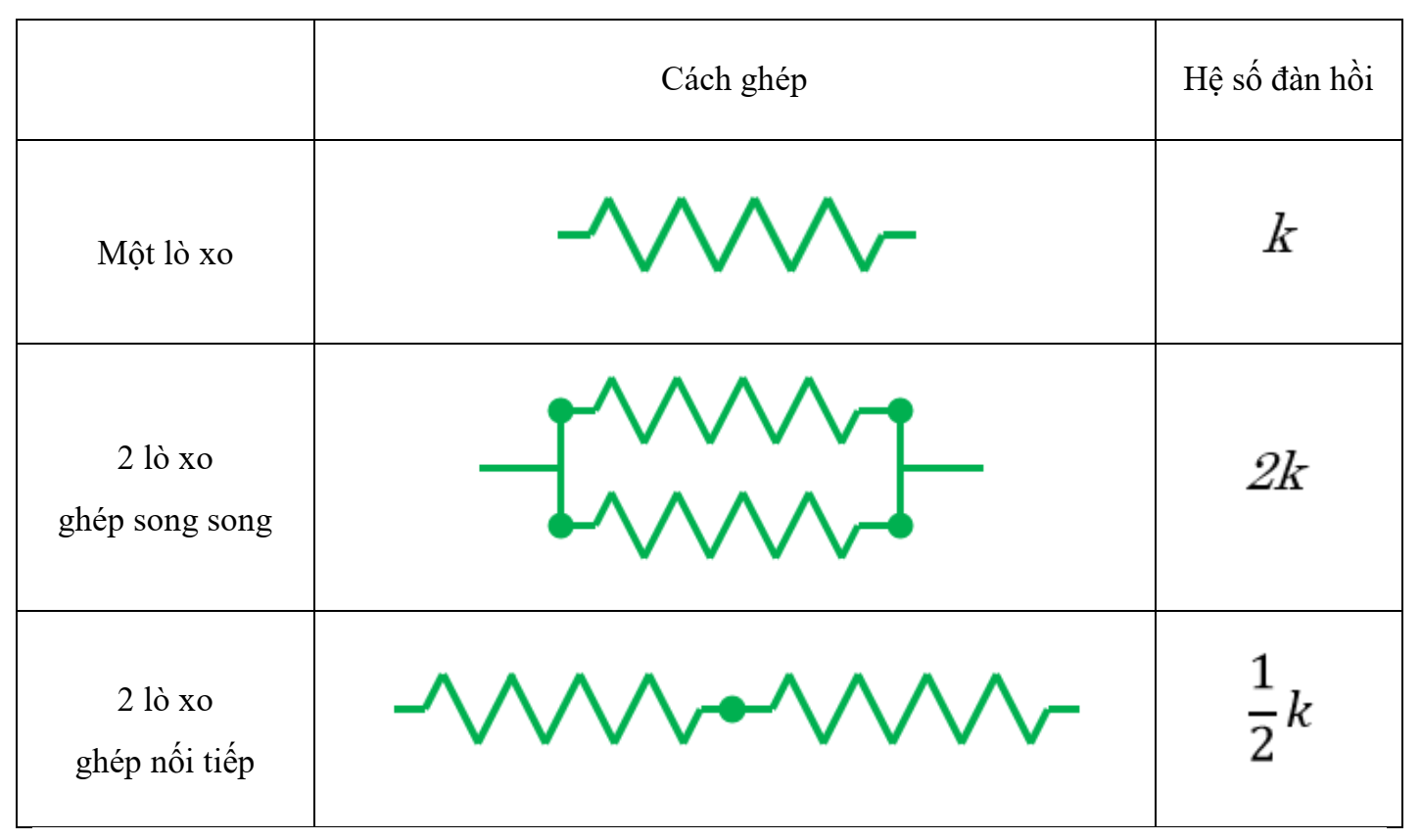
Bảng 3. Hệ số đàn hồi khi ghép các lò xo với nhau.
Ngoài ra, khi sử dụng nhiều dây đai, nếu bước răng và độ dày của các dây đai không khớp với nhau thì trong quá trình sử dụng sẽ dễ xảy ra sự cố. Vậy nên nếu muốn sử dụng nhiều dây đai một lúc, ta cần chỉ định rõ các điều kiện khi đặt hàng. Cách chỉ định khi đặt hàng là khác nhau giữa các nhà sản xuất, vì vậy các bạn hãy tham khảo catalog hoặc các tài liệu kỹ thuật tương ứng nhé.
4.Tổng kết
Vậy là đến đây, chúng tôi đã trình bày các vấn đề phát sinh trong bài toán kéo dài hành trình vận chuyển bằng hệ đơn trục sử dụng truyền động dây đai răng. Vì trục vít me không đáp ứng được bài toán có chiều dài hành trình lớn, nên việc sử dụng dây đai răng là rất hiệu quả. Tuy nhiên vì vật liệu có tính đàn hồi (cao su), nên cần phải chú ý kiểm soát các đặc tính tương ứng.
Những điểm cần lưu ý khi thiết kế hệ thống truyền động sử dụng dây đai răng như sau:
- Tính hệ số đàn hồi của dây đai răng từ lực căng cho phép và độ giãn.
- Tính lượng overshoot từ hệ số đàn hồi của dây đai răng và các điều kiện vận chuyển (tăng tốc/giảm tốc).
- Kiểm tra lượng overshoot cho phép từ các điều kiện sử dụng và các đặc tính kĩ thuật của hệ.
Ngoài các ưu điểm như giá thành rẻ, cấu tạo đơn giản, đáp ứng được hành trình vận chuyển dài của hệ cơ cấu chấp hành sử dụng dây đai răng, chúng ta cũng cần phải nhớ những đặc tính đặc trưng của dây đai răng làm từ vật liệu cao su. Không chỉ vậy, các cơ cấu chấp hành khác: trục vít me hay xi lanh, động cơ servo tuyến tính,v.v, chúng cũng có những đặc trưng riêng, vì vậy hãy nhớ xem xét các đặc tính kĩ thuật yêu cầu để đưa ra các lựa chọn thích hợp.
Ở những bài viết tiếp theo, chúng tôi sẽ nói về các vấn đề thường gặp khi sử dụng xi lanh không trục. Khi sử dụng nó một mình thì không có vấn đề gì, nhưng khi kết hợp với thanh dẫn hướng tuyến tính thì ta cần phải lưu ý một số điểm. Đồng thời, chúng tôi cũng muốn đề cập đến việc căn chỉnh vị trí của thanh dẫn hướng tuyến tính.
No comments:
Post a Comment